































Se extiende el uso de robots colaborativos en el ensamblaje automotriz. En AMS analizamos las aplicaciones, la tecnología y por qué es una tendencia en aumento
 BMW comenzó a utilizar un nuevo robot el año pasado en su planta de Dingolfing, Alemania. Pero no se trata de una enorme y poderosa máquina para la soldadura o pintura. Se trata del primer ejemplo en la planta de una tendencia que es cada vez más frecuente en la industria automotriz: la colaboración entre humanos y robots, también denominada robótica colaborativa.
BMW comenzó a utilizar un nuevo robot el año pasado en su planta de Dingolfing, Alemania. Pero no se trata de una enorme y poderosa máquina para la soldadura o pintura. Se trata del primer ejemplo en la planta de una tendencia que es cada vez más frecuente en la industria automotriz: la colaboración entre humanos y robots, también denominada robótica colaborativa.
En este caso se trata de un robot ligero LBR iiwa de Kuka al que se le ha asignado una plaza anteriormente ocupada por un operario humano solo para ayudarle en las tareas arduas y repetitivas de elevar y luego instalar la caja del diferencial para las transmisiones de eje delantero. Los diferenciales pueden llegar a pesar 5.5 kg y además del esfuerzo que supone elevar el componente para su instalación, se requiere también precisión para garantizar una colocación adecuada y delicadeza para evitar daños a los componentes.
Para poder poner en marcha este nuevo robot tuvieron que colaborar estrechamente la marca automotriz y el proveedor de los robots, para ello trabajaron en el desarrollo en la planta de BMW en Augsburgo y luego se implementó el concepto en Dingolfing. Uno de los aspectos más interesantes de esta configuración es que el robot está montado en posición invertida sobre el área de trabajo colgando de un fino marco de acero, algo posible gracias al ligero peso del robot. Pesa tan solo 30 kg.

Piezas pesadas, tacto suavePero tal y como explica Borkeloh, el proyecto requiere soluciones inteligentes para los retos que representa. “La fijación de la pesada caja del diferencial es una tarea increíblemente delicada", afirma. “No se deben dañar los sensibles flancos de los dientes al engranar los engranajes. Uno de los retos es la diferencia de peso entre los componentes que deben ensamblarse. Básicamente, teníamos que encontrar los parámetros adecuados para ajustar la sensibilidad de torque del robot a los diversos requisitos".
Sin embargo Borkeloh afirma que el aspecto visualmente más llamativo de la aplicación, la inversión del robot, es bastante ordinario desde el punto de vista de Kuka. “Es común para nosotros”, asegura. “Ya hemos implementado varias soluciones de montaje en techo”. La propia construcción del robot es un factor habilitador. “El robot LBR iiwa cuenta con sensores de torque de juntas en cada uno de sus siete ejes, lo que significa que no requiere sensores externos", explica. “Si lo sumamos al diseño ligero del robot, nos permite trabajar desde cualquier posición”.
Una tercera manoDe hecho, continúa Borkeloh, el sistema de sensores incorporado al robot es absolutamente crucial para poder utilizarlo en esta aplicación. “El ensamblado de un engranaje diferencial es muy delicado porque las ruedas dentadas deben engranarse cuidadosamente con otra parte dentada", nos comenta. El hecho de que la máquina cuente con sensores de torque de las juntas en todos los ejes garantiza que tiene la capacidad necesaria para detectar el contacto y el cumplimiento programable. “Esto significa que los humanos que colaboran con la máquina pueden controlar la secuencia de aplicación del robot sin equipos de control, tan solo con gestos, por ejemplo, tocando el robot”. “Los sensores también permiten al robot dominar las operaciones de unión controladas por fuerza, supervisión de procesos y procesos de trayecto continuo para los que se debe identificar la posición del objeto".
En cierta manera se convierte, en sus propias palabras, "en la tercera mano del operario humano”. En funcionamiento los componentes se alimentan al sistema automáticamente en una cinta transportadora y las prepara el operario, que coloca todas las piezas pequeñas y ligeras, como espaciadores y rodamientos de bola, en la cubierta y caja de transmisión de aluminio moldeado. Luego el operario pulsa un botón para activar el robot que comienza a funcionar para encajar la caja del diferencial cuidadosamente en su lugar.
 La última generación de robots como el UR3 de Universal Robots está diseñada y programada para trabajar en proximidad a los trabajadores humanos
La última generación de robots como el UR3 de Universal Robots está diseñada y programada para trabajar en proximidad a los trabajadores humanosPero también juega un papel el diseño en conjunto del robot. Según Borkeloh la cubierta de la máquinas es completamente de aluminio y junto con una geometría externa optimizada sin bordes afilados evita los posibles aplastamientos o cortes. Las máquinas cumplen los requisitos de seguridad funcional de los estándares internacionales DIN EN 62061 hasta SIL 2 y EN ISO 13849 en un nivel de rendimiento d ejecutado en Categoría 3.
Un enfoque cualitativoEn este caso Borkeloh está seguro de que un robot colaborativo es la única solución viable para automatizar la monótona y físicamente ardua tarea en una única estación. Sin embargo, advierte que la implementación de robots colaborativos requiere la evaluación también de otros factores. La aplicación específica debe diseñarse cumpliendo las directrices de colaboración entre humanos y robots. “El diseño de celda, los sensores, las piezas de trabajo, los procesos y las pinzas deben cumplir con el concepto de producción colaborativo", declara. Pero Borkeloh también destaca que los beneficios de un enfoque colaborativo deben ser más cualitativos que cuantitativos.
“Cuando implementamos aplicaciones colaborativas, el objetivo primario no siempre es mejorar el tiempo de ciclo", declara. En ese aspecto el único requisito en BMW Dingolfing era cumplir con el mismo tiempo de ciclo que la anterior operación manual, que es de menos de 30 segundos, no hay necesidad de ir más rápido. Sin embargo, nos dice,"el robot mejora sustancialmente la capacidad de los trabajadores de colocar las piezas suavemente sin dañar los dientes o los piñones”.
Por otro lado, una empresa que se ha centrado por completo en los robots colaborativos es la danesa Universal Robots (UR). Según su director tecnológico, Esben Ostergaard, la empresa ha alcanzado ventas de en torno a 15,000 unidades de sus robots UR3, 5 y 10 en los últimos ocho años y en la actualidad continúa creciendo rápidamente. Sus tres robots son máquinas de seis ejes, y la más grande de ellas, el UR10, tiene un alcance de 1.7 metros y una capacidad de carga de 10 kg.
"La máquina EVA de Automata pesa solo 8 kg, incluidos su controlador y se puede programar por internet, solo requiere un ordenador portátil que se encuentre en la "misma red WiFi que el robot" - Suryansh Chandra, Automata
Ostergaard afirma que con indiferencia del sector involucrado, la "motivación" para adoptar la tecnología casi siempre es la misma: "combinar los beneficios de la flexibilidad con los de la automatización". Es sorprendente sin embargo que no se debe limitar al trabajo cooperativo la relación que se establece entre los robots de UR y las personas. De hecho, dice, las instalaciones que conllevan la interacción directa entre genta y robots son "poco habituales".
En su lugar, considera que el enfoque adecuado es el de máquinas "que pueden utilizar personas que no sean expertas". Las propiedades clave de las máquinas incluyen su facilidad de instalación, programación y reconfiguración, su tamaño compacto, ligereza y seguridad integral. Ostergaard añade otro atributo clave, la facilidad con la que se pueden aplicar a procesos ya existentes.
La producción automotriz es uno de los principales clientes de la empresa aunque Ostergaard no se aventura a dar cifras. Los constructores automotrices utilizan estas máquinas normalmente en el ensamblado y no en el taller de carrocería en tareas simples pero repetitivas como la fijación de tornillos, aunque aumentan las aplicaciones en control de calidad.
Nos destaca que una de las características del sector automotriz, que probablemente se deba a su anterior experiencia con robótica 'avanzada', es una resistencia a que la plantilla de planta tenga responsabilidad en programación, incluso cuando los procedimientos para máquinas colaborativas son muy directos, como la manipulación física del brazo robótico mediante determinados movimientos. En su lugar la responsabilidad continúa siendo de los trabajadores especializados.
Asistir a una plantilla envejecidaNissan Motor Company está utilizando los robots de UR como solucionar diversas cuestiones en su planta de Yokohama, en Japón. Además de optimizar los procesos de producción, también está intentando resolver los problemas que causa una plantilla envejecida y la pérdida de capacidad física. La planta cuenta con 3,200 trabajadores que producen motores y componentes eléctricos para automóviles eléctricos. Un asunto problemático ha sido la superación constante de los 'tiempos de ciclo' en las áreas de ensamblado. Por este motivo la empresa ha tenido que recurrir a trabajadores de refuerzo con el consiguiente aumento de los costes laborales.
Por ello han empleado dos líneas de robots UR10 de Universal Robots en la planta para que los trabajadores humanos puedan adquirir experiencia en otros puntos de la línea y reducir así también la superación de los tiempos de ciclo. En un principio los robots se han utilizado para soltar pernos en los soportes de leva de las culatas de cilindro. Este proceso es muy exigente para las capacidades robóticas teniendo en cuenta además que el cuerpo del robot debe poder moverse con facilidad, ser compatible con tomas eléctricas de 100V y poder trabajar sin valla de seguridad.
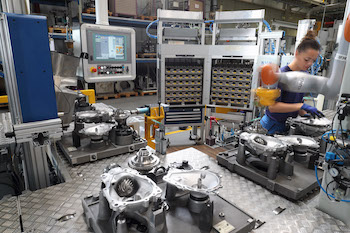 BMW ha presentado con éxito un robot colaborativo en una estación de ensamblado de transmisiones en su planta de Dingolfing
BMW ha presentado con éxito un robot colaborativo en una estación de ensamblado de transmisiones en su planta de DingolfingEn el plazo de una semana se instalaron y programaron los robots y se formó a los operarios. Los programas se ajustaron ligeramente después de la instalación y han estado operando continuamente desde entonces, por lo que han podido resolver el problema de retrasos en los ciclos y el esfuerzo de carga al que estaban sometidos los trabajadores. Además Nissan afirma ahora que el poder trasladar el robot de UR a cualquier lugar donde haya retrasos de ciclo les permite idear equipos de producción capaces de responder de manera flexible a la situación.
Nuevo cobot de peso ligeroEn el Reino Unido una pequeña empresa emergente está a punto de presentar su primer producto, un robot colaborativo ligero de seis ejes que aseguran marcará las diferencias por su facilidad de uso y su precio asequible. La empresa se llama autómata y emplea a 13 personas en Londres, su origen es bastante insólito teniendo en cuenta que su objetivo es vender al sector industrial. Sus fundadores son dos arquitectos, Suryansh Chandra y Mostafa ElSayed, que habían trabajado juntos en el estudio de la ya difunta Zaha Hadid. Según Suryansh Chandra su interés por este área surgió por la experiencia de trabajar con un pequeño robot con la tarea aparentemente sencilla de doblar paneles, donde ambos arquitectos observaron que las técnicas de programación eran demasiado complejas e intimidantes para personas sin un conocimiento profundo de la tecnología.
Sin embargo, lo primero que el usuario descubre sobre la máquina es su peso de tan solo 8 kg incluido su controlador integral, que Chandra afirma significa que no requiere un montaje especial y que simplemente se puede fijar en prácticamente cualquier superficie disponible. Otros parámetros de rendimiento de la máquina, denominada EVA, son un alcance de 600 mm y una capacidad de carga de 1.25 kg.
“En el caso de un contacto inesperado, humano o técnico, el robot reduce su velocidad instantáneamente y por lo tanto reduce su energía cinética a un nivel que evita las lesiones" - Henning Borkeloh, Kuka
Hay varios factores que permiten su peso ligero, que según destaca Chandra, significa que una sola persona puede levantar y transportar la máquina. Por un lado está el uso de metales ligeros y plástico en un proceso de producción de fabricación aditiva de piezas. Otro aspecto es el uso de electrónica moderna e intrínsecamente ligera en el controlador, que está alojado en la base de la máquina. Otro es la reducción de peso en el motor eléctrico que acciona la máquina. Pero el principal factor es que todos los elementos de la máquina se han diseñado desde el principio para alcanzar estos objetivos. “No utilizamos componentes disponibles", confirma Chandra.
Además la programación se puede controlar a través de internet. Chandra afirma que todo lo que se necesita es acceder a un sitio web desde una computadora que debe estar "en la misma red wifi del robot". Luego aparece una representación visual del robot que constituye la interfaz de necesaria con una programación que se implementa mediante un teclado convencional y el ratón. Básicamente, explica Chandra, existe un “back-end” del software de control del robot en un servidor remoto.
Como tal, la máquina recurre a los principios de la industria 4.0 para su programación. “Es un robot conectado", confirma. La programación también se puede realizar mediante el procedimiento mover el brazo robótico manualmente mediante las maniobras deseadas y registrándolas en la máquina.
Chandra afirma que el lanzamiento oficial del robot EVA está previsto para finales de julio o principios de agosto. También nos confirma que una de las empresas que ya ha mostrado interés en la máquina es un proveedor automotriz con sede en Reino Unido que prevé utilizarlo en aplicaciones como la fijación de códigos de barras, descarga de máquina herramienta, y especialmente la recuperación de pequeños componentes a media que se entregan en la línea de producción y luego se cargan en el equipo de producción.



